當人工智能的發展重心從純粹的數字空間向物理世界遷移,「具身智能」已不再僅僅是一個學術熱詞,而是成為衡量下一代技術競爭力的關鍵標尺。在這場從「大腦」到「身體」的範式轉換中,頂尖人才的流向往往預示著產業風向的變化。
近期,國內高校在人工智能領域的佈迎來重磅升級。隨著一系列基礎設施的完善與科研環境的優化,越來越多海外頂尖學者選擇歸國任教。這不僅是人才的回流,更是中國在物理智能領域構建自主生態系統的重要信號。以下這篇關於蘇昊教授加盟復旦大學的深度報道,將為我們揭開這一戰略佈局背後的細節。
推動“物理智能”的最終實現
克雷西 發自 凹非寺
具身智能領域論文被引次數最高的華人學者,帶著十七年海外積澱,回來了。
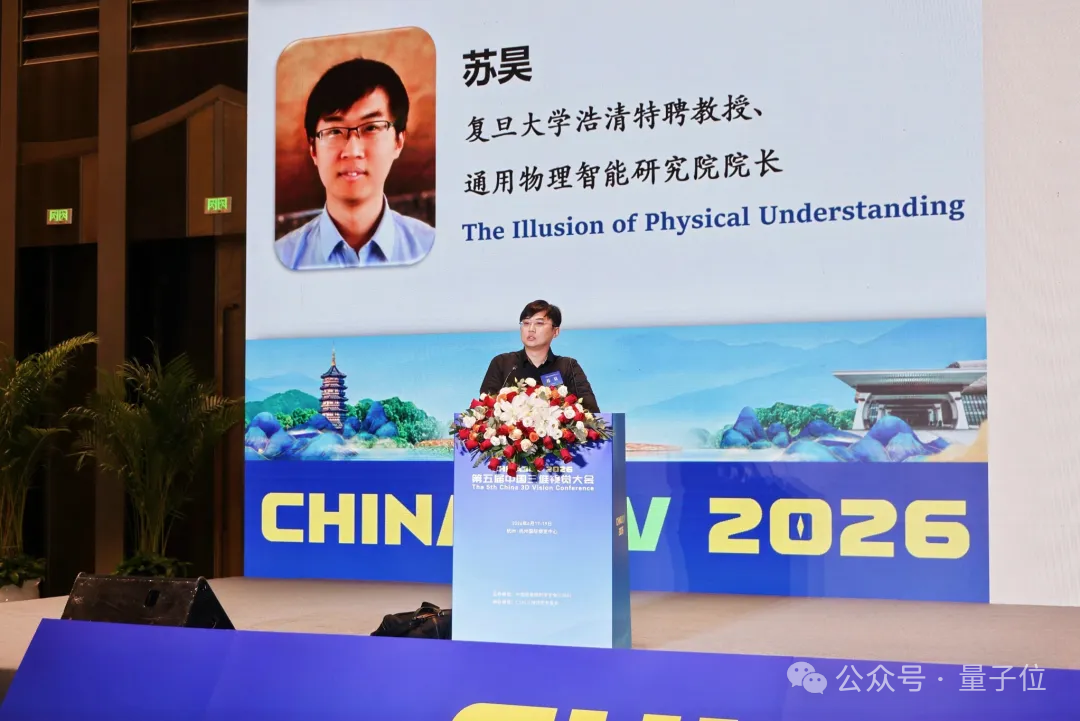
剛剛,在第五屆中國三維視覺大會(China3DV 2026)上,李飛飛弟子、ImageNet 作者蘇昊正式被復旦官宣加盟。
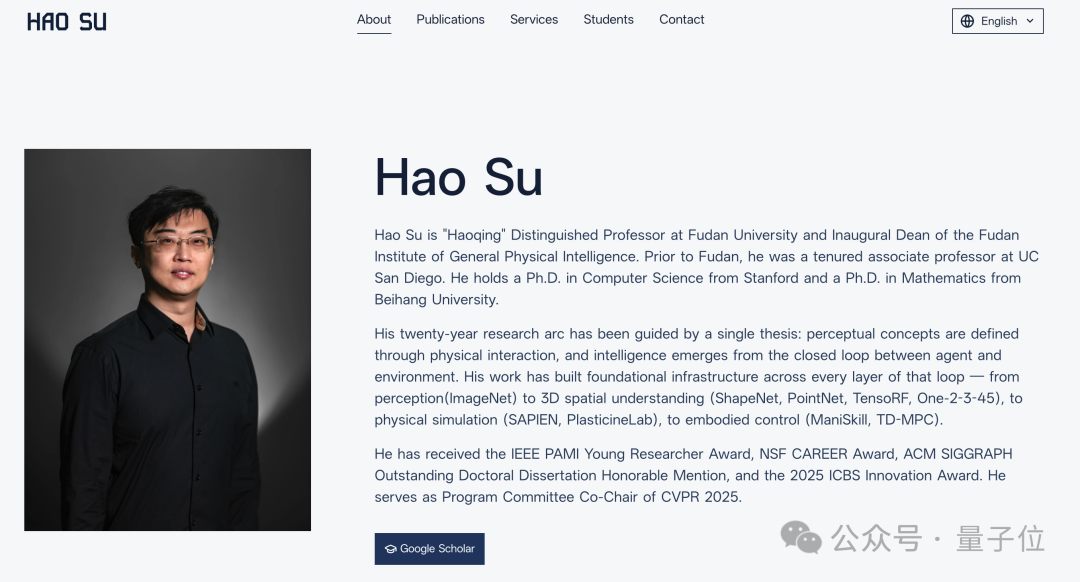
加盟復旦後,蘇昊將擔任浩清特聘教授,領銜建設通用物理智能研究院並出任院長。
對於蘇昊的回歸,復旦大學官方將其定義為復旦“面向智能時代的關鍵落子”。
實際上,早在官宣之前,UCSD 和復旦校內已有傳言流出,稱具身智能領域的領跑者蘇昊即將赴復旦任教。
如今靴子落地,坐實了這一場備受期待的回國。
誰是蘇昊?
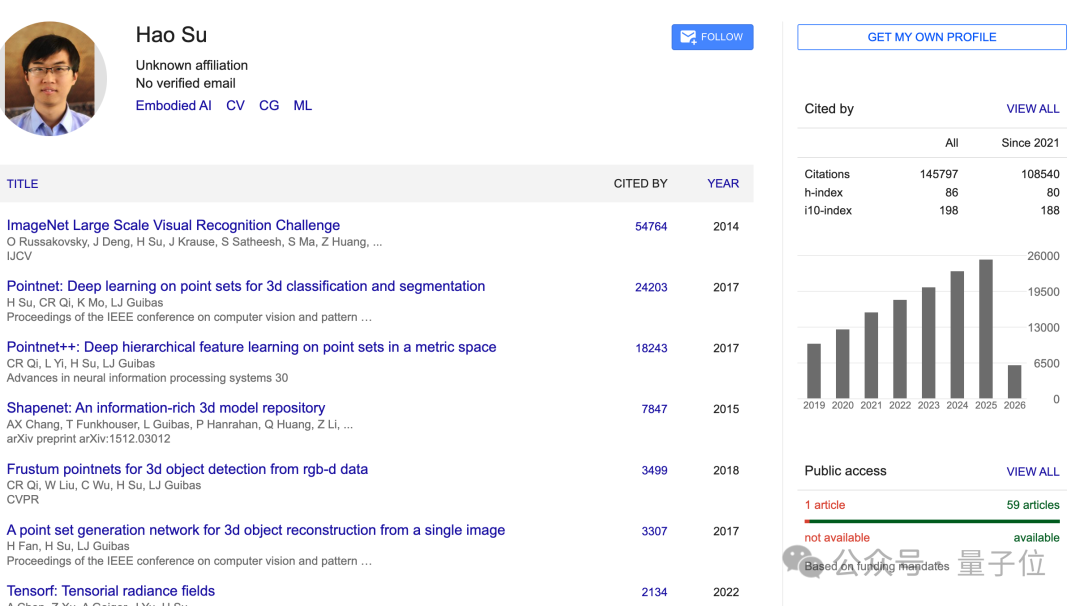
蘇昊,具身智能領域論文被引次數最高的華人學者,ImageNet 締造者之一,ShapeNet、PointNet、PartNet、SAPIEN、ManiSkill 等一眾奠基級項目的主導者,具身智能公司 Hillbot 聯合創始人兼 CTO。
在此之前,他是加州大學聖地亞哥分校(UCSD)計算機科學與工程系副教授,同時還是具身智能實驗室主任。
早前,蘇昊在 UCSD 的個人主頁已經停止維護、不再更新。
在蘇昊新的個人主頁上,已經更新了在復旦的最新任職。
截至目前,其谷歌學術被引次數超過 14.5 萬次,在具身 AI 領域的華人學者中排名第一。
去年,他還與謝賽寧共同獲得了 CVPR 青年學者獎,理由是表彰他們在計算機視覺領域的傑出貢獻。
值得一提的是,蘇昊還是弋力(清華叉院助理教授)、盧策吾(穹徹智能創始人、上交教授)、王鶴(銀河通用創始人、北大助理教授)、嚴夢媛(OpenAI 研究員)、莫凱淳(英偉達研究員)等一眾知名學者的師兄。
從北航到普林斯頓,再到斯坦福
2002 年,蘇昊進入北京航空航天大學攻讀計算機科學本科,是北航高等理工學院的第一屆學員。
本科期間,他師從中科院院士、前北航校長李未教授,研究數理邏輯與定理自動證明。
2005 年,經李未教授推薦,他前往微軟亞洲研究院(MSRA)實習,師從孫劍、沈向洋、周明。
彼時他主攻自然語言處理,但隨著研究深入,他逐漸意識到,相較於抽象的語言,直接來自物理世界的信號(如視覺)才是理解智能更根本的途徑。
蘇昊的研究重心,也由此轉向計算機視覺。
2008 年,在沈向洋的推薦下,蘇昊先後在普林斯頓和斯坦福參與了 ImageNet 項目,並在 2009 年跟隨李飛飛正式轉入斯坦福。
ImageNet 這一奠基性數據集,後來推動了近二十年的人工智能浪潮。
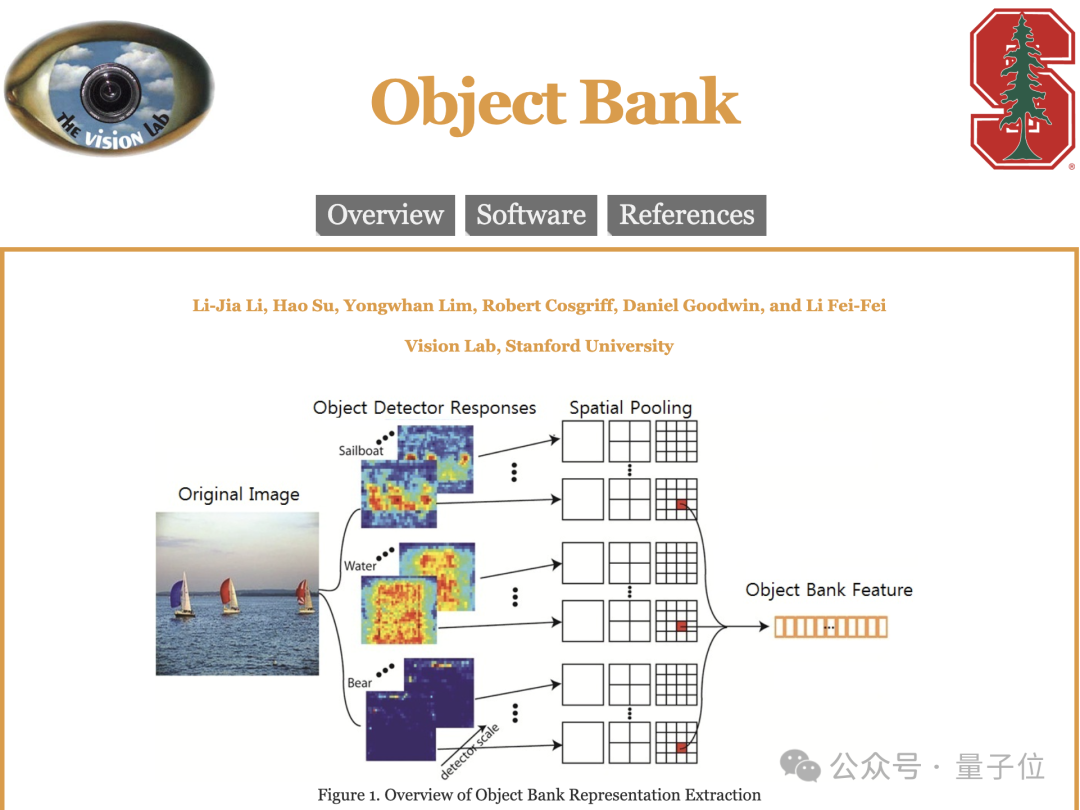
在 ImageNet 之後,蘇昊與李佳合作了 Object Bank,進一步提升了圖像在高層視覺任務中的語義表示能力,使得簡單分類器也能在物體識別和場景分類等任務上取得優異性能,這篇研究發表於 2010 年的 NIPS 上。
3D 視覺的奠基人
當 2D 視覺的方法論日趨完善後,蘇昊將目光轉向 3D 視覺。
2014 年,在獲得北航數學博士學位後的他,在 Leonidas Guibas 指導下於斯坦福攻讀計算機博士,主攻三維感知。
2015 年,他發布 ShapeNet——全球第一個大規模 3D 數據集,包含逾 300 萬個 3D CAD 模型,涵蓋 3135 個類別,被外界譽為”3D 領域的 ImageNet”。

ShapeNet 發布後,3D 視覺研究隨即進入黃金發展期。
2017 年,PointNet 與 PointNet++ 相繼發布,讓 3D 視覺相關論文在頂會的佔比從不足 10% 躍升至 70%。
其中 PointNet 是首個直接處理原始點雲數據的深度學習模型,而 PointNet++ 則進一步捕捉點雲中的局部結構信息。
這兩項工作,如今已廣泛應用於自動駕駛系統。

2018 年獲得斯坦福計算機博士後,蘇昊又發布了 3D 物體數據集 PartNet,並入職加州大學聖地亞哥分校。
從視覺到具身
感知之後,蘇昊的下一個問題是,能不能把具體的感知算法整合進一個更大的系統?
這一思考,驅動他從計算機視覺遷移到機器人研究。
2020 年,他基於 PartNet 發布了全球第一個以可泛化操作為核心的模擬器——SAPIEN(命名靈感來自《人類簡史》中的“智人”),為機器人視覺與交互任務的研究搭建了關鍵基礎設施。
2021 年,他又在此基礎上推出 ManiSkill 機器人操作仿真平台,用於測試和訓練機器人操作技能。
同年 ICCV,蘇昊發起 workshop,聚焦基於物理的建模與仿真、基於學習的仿真、人體仿真到具身視覺和機器人學習等廣泛主題。

這些成果,也延續到了蘇昊創辦的具身智能公司Hillbot上。
2024 年,蘇昊加入了具身智能的創業浪潮,創辦了 Hillbot,並擔任首席技術官。
Hillbot 旗下擁有的兩張王牌,正是蘇昊此前發布的 SAPIEN 仿真器及 ManiSkill 訓練平台,主打模擬與 3D 生成。
另外,Hillbot 已與英偉達合作,藉助 Nvidia Cosmos 平台生成高仿真視頻訓練數據。
產品方面,Hillbot 推出了輪式機器人 Hillbot Alpha,基於仿真訓練,主要用於複雜環境下的移動操縱任務,如零售店、咖啡館和製造車間等。

為什麼選擇復旦?
對於加盟復旦這個選擇,蘇昊給出了簡潔而堅定的解釋:
因為復旦要做的事,與我要做的事,是同一件事。
那件事,指的便是推動“物理智能”的最終實現。
所謂物理智能,是讓 AI 系統在物理世界中有效完成任務——既能理解這個世界,也能執行恰當的行動。
在蘇昊看來,這不僅是算法問題,更涉及機器人實體、多學科交融,以及一個完善的產業生態。
他看中復旦的理由具體而落地,復旦擁有深厚的數學、物理學科根基,積極推進的新工科建設,以及地處上海和長三角中心的產業與區位優勢。

以此為目標,加盟復旦後,蘇昊將領銜建設通用物理智能研究院。
該學院依託復旦大學智能機器人與先進製造創新聞學院,打破傳統院系劃分,不設學科邊界,完全圍繞問題導向,匯聚數學、物理、計算機、人機交互、腦機接口等多領域頂尖人才。
他直言,研究院的目標是培養未來 5 到 10 年的人工智能領軍人物。
在人才培養理念上,他強調兩點——高品位的科研眼光(知道什麼問題值得做)和長週期的探索耐心(願意把問題做完)。
論文不是目標,而是副產品。真正的標尺,是能否在真實世界中實現智能體的有效行動與自主決策。
研究院將重構課程體系,縮短從基礎到前沿的路徑,讓學生盡早進入科研與實踐,同時大力支持師生創新創業,推動成果轉化。
具身智能:樂觀,但謹慎
對於當下火熱的具身智能賽道,蘇昊的判斷是“謹慎的樂觀”。
樂觀的底氣來自問題本身,因為這是一個既有科學深度、又有巨大產業潛力的真問題。
謹慎則來自於現實,因為當前湧現出的大量精彩演示,與真正的通用能力之間,仍存在關鍵斷層。
而填補這一斷層的核心,正是物理智能。

談到“具身智能的 ChatGPT 時刻”,蘇昊坦言,短期內實現大語言模型那種程度的泛化還不現實,但在更長時間尺度上,方向是清晰的。
他預見,具身智能將深度滲透製造業、服務業、養老行業等領域,最終推動人類走向“人機正面互動、人機共存的時代”。
而通往那一未來的橋樑,正建立在今天對物理智能的紮實探索之上。
蘇昊從中國出發,一路從 2D 到 3D,從視覺到具身,一步步打通“讓機器理解世界”的關鍵路徑。
如今,他帶著這一切回來了——落腳復旦,直面物理智能這道真正的難題。
世界級 AI 科學家的加盟,也把復旦在 AI 和具身智能,推向了世界最前沿。
從行業視角觀察,蘇昊的歸國不僅是單一的人才流動事件,更是國內具身智能產業鏈條趨於完善的縮影。過去,國內研究側重於算法層面的追趕,而在仿真環境、物理引擎與數據閉環等基礎設施上相對薄弱。蘇昊團隊帶來的 SAPIEN 與 ManiSkill 等平台,恰好補齊了這一關鍵短板,為後續的模型訓練提供了不可或缺的“土壤”。
同時,復旦大學此次組建通用物理智能研究院,採用了跨學科的組織形式,這意味著未來的人才培養將不再局限於計算機科學單一維度,而是深度融合機械工程、控制理論與認知科學。這種範式轉變,對於解決具身智能中“大腦”與“小腦”協同難題至關重要。儘管挑戰依然存在,尤其是在硬件成本與泛化能力的平衡上,但隨著頂尖學術力量與產業資源的進一步對接,中國在物理智能領域的競爭力有望迎來實質性躍升。