具身智能正处于从静态操作向动态交互跨越的关键节点。在高速、高动态的非结构化环境中,机器人如何实现对物体的精准感知、实时决策与灵巧控制,一直是学术界与产业界共同攻关的难题。乒乓球运动因其球速快、旋转复杂、对抗性强,被视为检验机器人实时响应系统的绝佳试金石。
最近,索尼在机器人领域的最新进展引发了行业广泛关注。其研发的智能乒乓球机器人系统在真实对抗中展现了令人瞩目的性能,相关研究成果更是登上了顶级学术期刊的封面。这不仅是一次技术展示,更是对现有机器人感知与控制架构的一次深度验证。
技术观察员 发自 实验室
深度科技观察 | 专注前沿硬件
索尼的机器人项目再次引发了行业关注,这次他们选择了一个极具挑战性的场景。
搭建标准乒乓球台,直接邀请职业选手进行实地对抗。

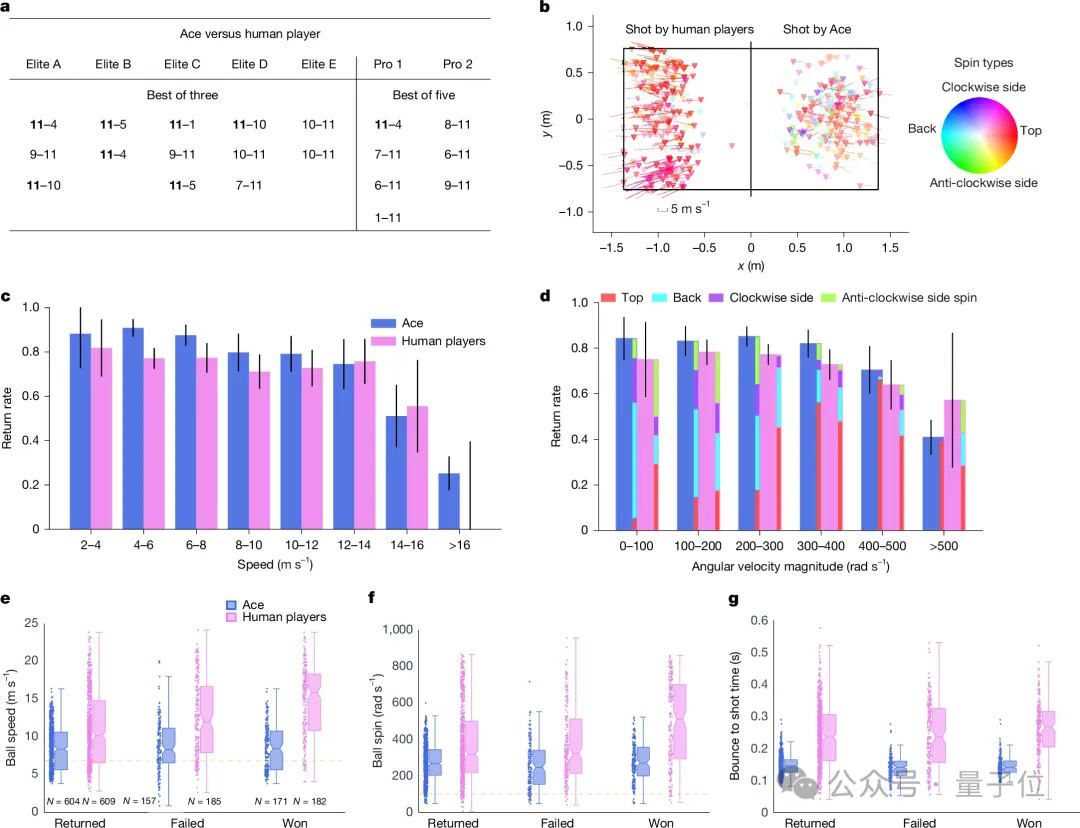
这台拥有 8 自由度的机械臂,在与日本精英级选手的 5 场较量中,取得了 3 胜 2 负的成绩。
在此后的半年时间里,该系统陆续战胜了多位日本职业选手,其中包括 2019 年美国公开赛女单亚军平真由香,以及 WTT 世界排名第 25 位的木原美悠。
实机对抗的画面显示,机器人的反应速度与击球精度已达到相当高的水准。
背后的研究成果获得了学术界的高度认可,直接登上了期刊封面。

虽然此前伯克利大学曾实现让宇树 G1 与人类连拍 106 板,港大 Smash 项目也能让 G1 在室外进行乒乓球运动。
但需要客观指出的是,前述项目大多未处理球的旋转问题,主要依赖陪练配合的平球,难以应对职业选手发出的强旋转球。而索尼的这套系统正经实现了实打实的对抗,在核心技术指标上确实取得了突破。
(完整幕后比赛视频可参考:
比赛规则完全遵循国际乒联(ITTF)标准,采用 11 分制,场地均为正规比赛场地。
对手主要分为两个档次。
第一档为精英级(elite),定义为至少拥有 10 年训练经历、每周训练 20 小时以上的业余高手,共 5 位(3 女 2 男)。
第二档为职业选手,包括日本 T 联赛现役的两位球员,Minami Ando 和曾根翔。
这些球员此前均未见过该机器人系统。没有针对性录像训练,没有定制策略,直接上场对抗。
结果显示,2025 年 4 月在东京进行的第一轮测试中,机器人对精英级选手 3 胜 2 负,13 局中赢下 7 局。
对职业选手 0 胜 2 负,7 局中抢下 1 局。
整体表现符合预期。
论文提交之后,研发团队并未停止优化。
2025 年 12 月进行的第二轮测试中,机器人赢下了平真由香。2026 年 3 月的第三轮测试中,机器人赢下了包括木原美悠在内的三位职业选手。
据 SonyAI Director Peter Dürr 介绍,升级后的系统出球速度更快、落点更贴近球台边缘、回合节奏也更紧凑。
从视觉捕捉到挥拍动作,系统端到端延迟仅为 20.2 毫秒。而顶级人类球员的反应时间约为 230 毫秒。
两者相差十倍之多。
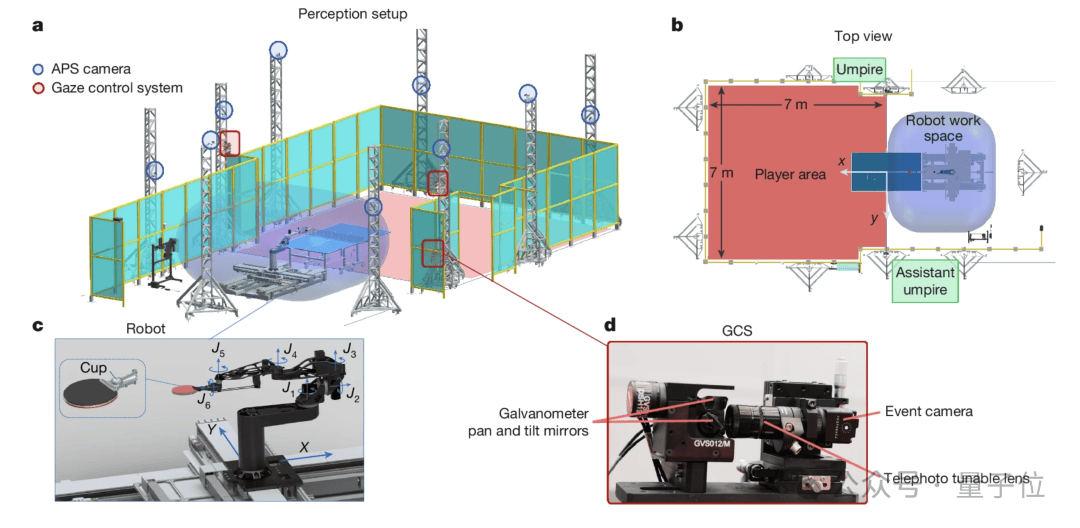
该系统的整体架构可拆解为感知、决策、执行三个模块。
感知模块,由 9 台 APS 相机分布在球台四周,每台配备一块 FPGA 芯片。相机本地先行完成二维小球检测,仅将压缩后的结果传输至中央服务器,再进行三维定位。
整套流程耗时 10.2 毫秒,空间误差控制在 3 毫米以内。
但仅知道球的位置还不够,必须解析球的旋转。旋转决定了球落台后的反弹轨迹,进而决定挥拍策略。
索尼采用的是自家的事件相机(event-based vision sensor)。传统相机类似连拍,而事件相机仅在画面像素发生变化时上报数据,天然具备低延迟特性。
配合一套名为 gaze control system 的装置,三块可转镜片追踪球的运动,一颗可电控变焦的长焦镜头确保球体始终清晰,三套系统从不同角度监测球上 logo 的翻转,从而计算角速度。
刷新率可达 400 到 700Hz,平均误差为 24.8 弧度/秒。
决策模块,基于深度强化学习策略,每 32 毫秒(31.25Hz)读取一次球和机械臂状态,输出动作指令。

训练算法采用 SAC(Soft Actor-Critic),属于较为经典的方案。
但其中有一个关键设计称为 privileged critic。训练时给 critic(评判者)提供仿真里的真值,而给 policy(决策者)仅提供带噪声的传感器历史数据。
这相当于让老师看参考答案,让学生只能看模糊照片解题。学生被迫学会自己做传感器融合和轨迹预测,无需人工干预,系统自行摸索出规律。
整套策略完全在仿真环境中训练,未接触过一个真实球体。部署到真机上即可直接使用。
作者 Peter Dürr 本人承认,这个技术路径他一开始并不相信,后来被结果证明是可行的。
执行模块,机械臂为定制设计,拥有 8 个自由度(2 个直线关节负责沿球台前后左右平移,6 个旋转关节负责球拍姿态和速度)。采用 Scalmalloy 合金 3D 打印,经过拓扑优化,兼具轻量化与稳定性。

末端配备蝴蝶 D05 胶皮配 VICTAS ZX-GEAR OUT 底板,与日本职业选手使用的装备级别相同。球拍旁还挂有一个小杯子,用于单臂发球时托球。
所有电机 1 毫秒同步一次,位置跟踪延迟不到 5 毫秒,最大挥拍速度对标职业选手正手强攻时的 20 米/秒。
感知 + 决策 + 执行,总延迟控制在 20.2 毫秒。
客观来看,看到这篇论文时,第一反应不仅是技术层面的惊叹,更是对索尼机器人战略布局的重新审视。
二十年前,机器人技术的第一梯队毫无疑问属于日本。
1999 年索尼推出 AIBO 机器狗,售价 3000 美元,20 分钟内售罄,累计销量达 15 万只。

2003 年索尼又推出 QRIO,全球第一款能双足奔跑的人形机器人。当时本田的 ASIMO 跟各国政要握手敲钟,丰田的机器人甚至能吹小号。
那时全球要看机器人技术,往往得飞往东京。
然而,这种优势并未持续太久。
当时的机器人只能表演,无法实际干活。表演场景无法支撑研发成本,最终变成了科技花瓶,销量下滑导致项目被砍。
2006 年 1 月 26 日,索尼一天之内砍掉了 AIBO 和 QRIO 两个项目。
2018 年 ASIMO 也宣布停产。日本千叶县的光福寺,每年甚至给报废的 AIBO 办超度法事,一次可达 800 只。
……
时间快进到 2025 年,全球人形机器人出货量达 1.3 万台,中国占 90% 以上,前六名全是中国公司,日本没有一家上榜。
机器人这场竞赛,已经变成了中美的游戏。
该项目共同作者中,有一位叫 Hiroaki Kitano(北野宏明),索尼计算机科学实验室的 CEO。

他正是当年 AIBO 的发起人,人称 AIBO 之父,QRIO 也是他带出来的,RoboCup 也是他搞的。
两个项目 2006 年被砍,他没走,熬了快二十年,直到这篇论文发表。
虽然形态上还是一台固定基座的机械臂,虽然窗外的中国人形机器人已经在春晚上扎堆跑武术。
但能重新回到技术牌桌,可能已经很好了吧?
索尼此次的技术突破,不仅展示了其在传感器融合与强化学习方面的深厚积累,也为未来服务型机器人进入复杂人类环境提供了新的技术路径参考。尽管在商业化落地方面仍面临成本与场景适配的挑战,但这种在极端动态环境下验证过的实时控制能力,无疑是具身智能发展史上的重要里程碑。
对于整个行业而言,这意味着机器人正在从“预设程序执行者”向“实时环境适应者”转变。如何在保持高精度的同时降低系统延迟,将是接下来各大厂商竞相争夺的技术高地。
[1]
[2]





