过去两年,具身智能赛道几乎被视觉感知“统治”——让机器人看懂世界,成了行业共识。但真正落地时,一个尴尬的现实浮出水面:绝大多数精细化操作的失败,并不发生在视觉识别阶段,而是发生在物理接触之后。
能对准USB接口,却插不进去;能夹起衣物,却理不顺褶皱。问题出在“碰”的那一刻——机器人不知道碰得对不对、力度合不合适、下一步该怎么调。这正是具身智能行业至今未解的硬骨头。
5月27日,一家名为新智具身(NeoteAI)的初创公司宣布完成近亿元天使轮融资,由上海国投旗下上海科创集团、复旦科创联合领投,上海科创集团旗下策源基金等跟投。这家公司选择了一个与众不同的切口:触觉具身智能。
在视觉大模型、VLA架构成为融资标配的当下,新智具身把宝押在了一个更底层的物理问题上——机器人不只要看懂世界,还要在碰到世界之后,知道自己碰到了什么。

新智具身的核心判断是:具身智能正从“视觉中心主义”向“视觉+触觉双中心”演进。视觉负责全局定位与语义理解,触觉则承担接触后的物理状态反馈与动态调整。只要机器人跟物理世界产生交互,触觉就是绕不开的感知模态。
但触觉的落地,远不是装个传感器那么简单。若触觉信息只停留在孤立的硬件读数上,就无法真正转化为操作能力。新智具身的目标很明确:把触觉感知变成可训练的标准化数据,深度融合进具身模型的训练与推理全链路。
这家公司来自复旦大学可信具身智能研究院,是复旦与静安区战略合作的重要落地成果。CEO赵世豪,本硕复旦、博士港大,曾在微软全球研究院、阿里通义实验室研究视频世界模型;首席科学家吴祖煊,复旦可信具身智能研究院副院长,前Meta研究员;COO董道国,近20年产业经验,曾是华为荣耀Magic一代首席架构师。

这支团队没有选择单一硬件切入,而是同步布局了三个板块:视触觉传感器、精细化数据采集平台、触觉具身大模型。三者形成闭环。
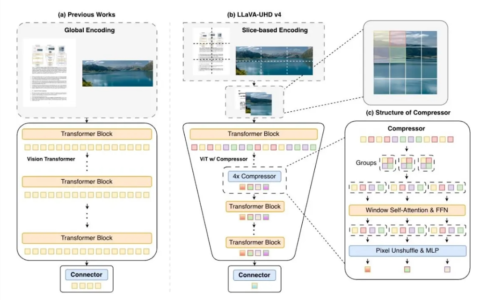
传感器方面,新智具身走的是视触觉路线——内部集成微型相机,通过拍摄柔性硅胶在接触时的形变图像,解耦出六维力、滑移、轮廓、像素级力场分布。相比传统压阻式、电容式传感器只能输出低维离散信号,视触觉方案信息密度更高,且输出格式与视觉数据天然兼容,能直接接入Transformer架构。
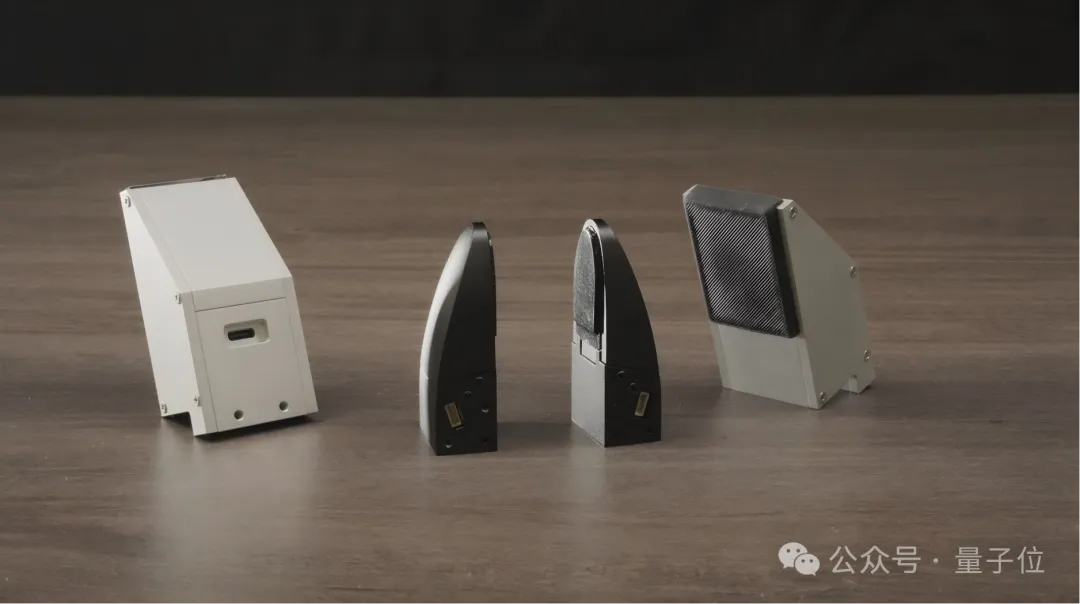 新智具身·视触觉传感器
新智具身·视触觉传感器数据是第二个关键。新智具身搭建了超千平方米的专业化触觉数据采集中心,聚焦USB插接、螺丝拧入、线束装配、织物整理等精细化场景。这些任务成败的关键信息只存在于接触过程中。公司采用“真机采集线+自研触觉UMI便携采集终端”组合,保证数据精度与多模态同步性。当前具身领域数据量大约千万级,而语言模型已是十亿甚至百亿起步——这种差距直接限制了泛化能力。所以新智具身把“先做大”放在最高优先级。
 新智具身·大规模触觉+视觉的具身数据采集
新智具身·大规模触觉+视觉的具身数据采集模型层面,新智具身将触觉接入VTLA(视觉-触觉-语言-动作)大模型与触觉世界模型,并在强化学习中把触觉作为实时修正信号。传统VLA面对精细操作常因感知盲区失败,而触觉数据能实时反馈夹持、滑移、到位、形变等真实状态,极大提高成功率。
商业化第一站选在工厂。原因不难理解:工业场景任务结构清晰,效果可量化,触觉带来的增益容易验证。线束装配、内存条插拔、柔性材料整理——这些场景长期依赖人工,不是视觉做不了,而是接触后的状态变化太复杂。上海本地汽车、3C、家纺产业聚集,为新智具身提供了天然的测试场。目前公司已在多个细分场景落地POC验证订单。
从竞争视角看,新智具身的后发优势很清晰:纯视觉路线经过多年发展已进入资源密集型竞争,研发成本高但精细操作瓶颈凸显。对于后来者,沿着先行者的路走很难突围,必须在行业尚未解决的核心难题上建立壁垒。新智具身的判断是:把触觉从可选模态变成机器人标配。
看懂任务只是入门,能否在物理交互中实时调整动作、稳定完成任务,才是下一阶段的分水岭。而这条路上,新智具身已经拿到了第一张入场券。