2026年,世界模型成了AI圈最硬通的“社交货币”。
Yann LeCun离开Meta后创办的AMI Labs,一举拿下10.3亿美元融资,投前估值为35亿美元。李飞飞的World Labs持续押注空间智能,成为一级市场最抢手的标的之一;英伟达在GTC上抛出Physical AI,直言工业与机器人市场的潜在规模将达到50万亿美元。
资本、人才、顶尖头脑,都在往同一个方向汇聚——让AI真正理解物理世界。这背后,其实是AI行业从“算法竞争”向“物理理解”的深刻转向。过去几年,大语言模型在数字世界里取得了惊人的进展,但将这种能力投射到真实、动态、充满不确定性的物理环境中,仍然是尚未被征服的“最后疆域”。
红杉AI峰会上,英伟达机器人负责人Jim Fan更是直接放话:行业的重心,正从VLA(视觉-语言-动作模型)转向世界动作模型(World Action Models)。这句话的冲击力在于,它一刀切开了过去两年具身智能行业最热的技术路线,并提出一个终极拷问:机器人会看、会听、会执行动作之后,下一步该是什么?
答案越来越清晰,它需要一个能理解物理世界、能预测行动后果、能持续修正经验的、真正贴近人脑运作模式的机器人“大脑”。
刚刚完成新一轮亿元融资的具脑磐石,从成立之初押注的正是这个方向。具脑磐石由朱森华创立。他曾任华为云AI算法创新Lab主任,主导过AI脑科学云平台、盘古具身大模型、全球具身智能产业创新中心等系统级项目。在业内,他被称为“华为具身大脑一号位”。

现在,他把创业方向押在了一个更具挑战性的交叉点上:用认知神经科学,重做机器人的大脑模型。具脑磐石给这套系统起了一个名字:认知世界模型,Cognitive World Model。说得更直白一点,它想让机器人拥有一颗会推演、会记忆、会自我更新的类脑认知中枢。
过去两年,VLA是具身智能行业里的主流叙事。这条技术路线的逻辑很直接:将视觉、语言和动作统一进一个端到端模型,机器人能看懂环境、理解指令,并直接输出行动。这条路线已经在一些场景里验证了价值,比如分拣、上下料、简单装配、仓储搬运、零售后台整理等任务,环境相对可控,动作链条相对明确,VLA能够让机器人从“能动”进一步走向“能按指令动”。
但随着真实场景变复杂,VLA的能力边界也开始显现。
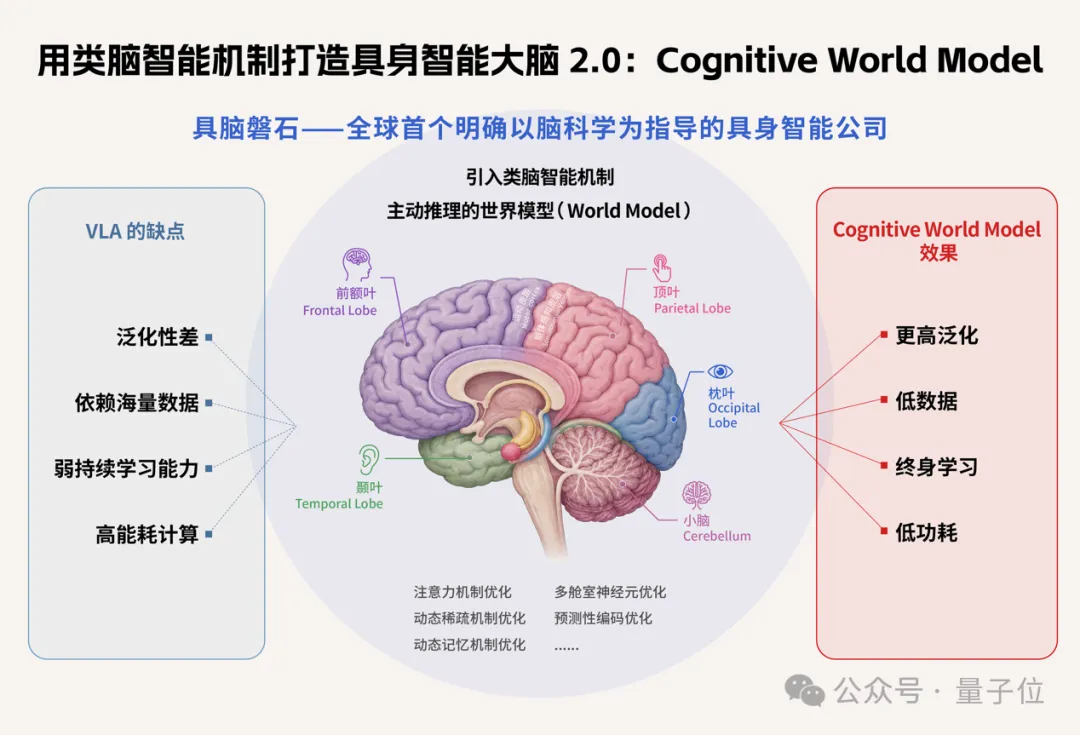
首先是数据。换一批物体、换一个光照、换一种桌面布局,模型往往要补充新的示范数据。机器人看起来在学习,很多时候仍然依赖人类提前喂给它的数据样本。其次是泛化。VLA更擅长从数据中学习统计相关性。它能知道“看到这个东西,大概率要做这个动作”,但面对物理因果、长期后果和开放环境变化,稳定性仍然不足。再就是记忆。今天很多机器人完成一次任务后,很难像人一样把经验沉淀下来。下一次面对相似任务,仍然容易从头开始。
这也是行业里那句老话的来处:有多少人工,才有多少智能。从这个角度看,VLA更像一个高效的“肌肉记忆”系统,而非一个拥有“思考能力”的智能体。当任务场景出现哪怕一点微小变动,从光照角度到物体材质,系统就需要重新“投喂”数据,这从根本上限制了机器人的适应性和规模化部署的可能。
世界模型的价值,正在这里显现。它试图让机器人在行动之前,先在内部完成一次“推演”:如果我这样抓,杯子会不会倒?如果我往前走,这条路是不是会被障碍物挡住?如果我先打开柜门,再拿东西,任务链条是否更稳?
人类每天都在做类似的事。过马路时,人并不会精确计算每辆车的速度、距离和轨迹,但只要扫一眼,就能判断什么时候能过、什么时候该停。这背后依靠的不是单一感知能力,也不是动作库,而是一套关于世界如何运转的心智模型。具脑磐石要做的,就是把这套能力工程化,装进机器人系统里。
世界模型很热,但麻烦也在这里:大家口中的“世界模型”,常常指向不同的技术层级。有人说的是3D空间建模,有人说的是视频生成,有人说的是仿真和强化学习,有人说的是JEPA,还有人说的是主动推理。朱森华把当前世界模型的路线,自下而上拆成五层。
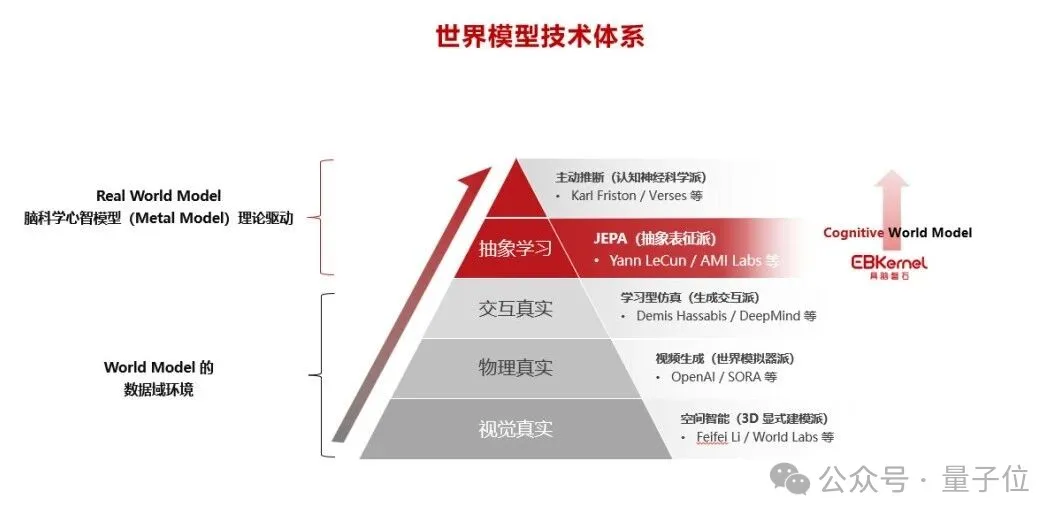
第一层,是视觉真实。核心是从2D图像走向3D空间理解。以李飞飞的World Labs为代表,解决的是“机器人怎么看世界”的基础问题。没有这一层,后续的智能处理无从谈起。
第二层,是物理真实。聚焦重力、摩擦、碰撞等物理规律的建模。以Sora等视频生成模型为代表,模型试图从海量视频中学习物理直觉。可问题在于,画面逼真并不等于因果可靠。一个视频可以非常像真实世界,但里面的物理逻辑未必稳定。例如,一个物体可能违反重力法则漂浮起来,但在视觉上看起来依然流畅,这对需要精准操作的机器人来说是致命的。
第三层,是交互真实。这一层更接近仿真、强化学习和机器人试错。它强调智能体通过“行动—反馈”积累经验,DeepMind、英伟达等公司都在这一方向持续投入。
第四层,是抽象表征。这是Yann LeCun的JEPA架构的领地。它让模型在隐空间里学习状态如何变化,减少对像素级重建和token级预测的依赖。举个例子,模型无需逐帧预测一个杯子未来每个像素会变成什么样,而是学习“杯子被推了一下,大概率会往哪个方向移动,是否会倒下”。
第五层:主动推理。这是具脑磐石最看重的一层。它来自认知神经科学,背后包括自由能最小化、预测编码、贝叶斯大脑等理论,是目前最接近人类智能本质的理论框架。翻译成人话是:智能体会主动形成假设,预测结果,执行动作,再根据环境反馈修正自己的内部模型。也就是,边想边做,边做边学。
在具脑磐石看来,前三层更多解决“看见世界、模拟世界、训练世界”的问题;第四层开始进入抽象表征;第五层则真正触及机器人认知能力的上限。也正因此,具脑磐石把自己定位为类脑智能驱动的具身智能2.0公司。这个判断带有明确的技术立场:机器人下一阶段的竞争,不会只停留在动作生成和遥操作数据规模上,而会进入认知世界模型、主动推理、长期记忆和持续学习的整合竞争。
具脑磐石的技术路线,与Yann LeCun推动的JEPA有着明显关联。JEPA,全称Joint Embedding Predictive Architecture,联合嵌入预测架构。它的核心价值,是让模型在抽象表征空间里学习世界状态的变化。相比逐像素预测、逐token拟合,这种方法更接近人类对世界的理解方式,也更适合处理复杂环境中的泛化问题。
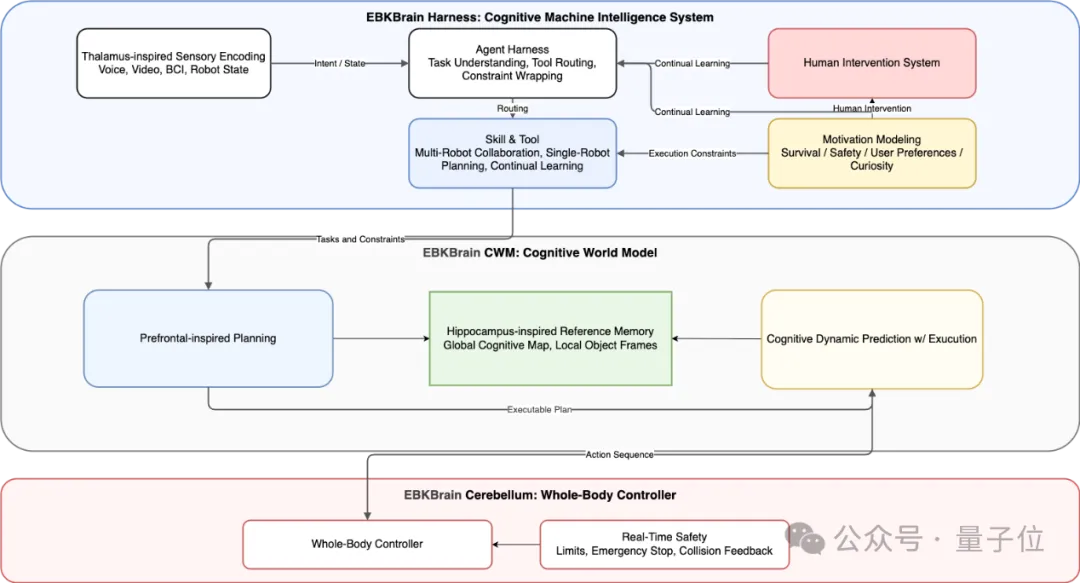
但对机器人来说,只有“表征—预测”还不够。机器人最终要进入真实物理世界。它需要感知环境、理解任务、预测后果、规划动作、执行任务,还要从失败和反馈中继续学习。因此,具脑磐石提出的认知世界模型,更像是一个面向具身落地的JEPA增强版。它要把JEPA的世界表征能力,推进到一条完整链路里:感知,认知,预测,规划,行动,反馈,学习。
这也让具脑磐石与“世界模拟器”路线拉开差异。具脑磐石追求的重点,不是生成一个看起来足够真实的视频世界,而是为机器人提供一个可以参与真实任务闭环的认知计算推理引擎。
围绕这套目标,具脑磐石把技术攻关拆成四个方向。第一,类脑感知编解码机制。这对应视觉、听觉、力触觉等多模态信息的融合,让机器人更高效地理解真实环境。第二,认知动态预测机制。这对应物体交互、空间变化、重力、碰撞等物理规律的理解,让机器人具备推演行动后果的能力。第三,终身学习记忆机制。这对应经验沉淀和持续学习,让机器人减少“学新忘旧”,逐步形成可迁移的任务经验。第四,低功耗稀疏计算架构。这对应未来机器人端侧部署需求。真正进入家庭、工厂、门店的机器人,不能长期依赖高功耗云端推理。
这四个方向最终指向四个结果:低数据、高泛化、终身学习、低功耗。这也是具身智能落地最难绕开的四道关:数据成本、跨场景适应、长期运行和算力约束。具脑磐石的野心也在这里:它想把类脑智能从一个学术概念,推成可验证、可部署、可商业化的具身智能大脑架构。
融资落地后,具脑磐石也进入了一个更具体的阶段。这家成立于2025年的类脑世界模型公司,近日完成了一轮亿元级融资,本轮融资由具备深厚类脑与具身产业背景的顶尖产业资本领投,老股东及多家顶尖基金复投和跟投。同时,更新一轮融资也在同步交割中。多维资本担任独家财务顾问。本轮融资后,具脑磐石将继续投入核心技术研发、团队扩充与全球市场拓展,重点推进Cognitive World Model的研发、工程化落地和真实场景验证。
投资人愿意下注具脑磐石,除了世界模型这个方向足够热,也因为这支团队的配置相对少见。有投资人将其评价为“国内唯一兼具AI×脑科学交叉深度与产业落地广度的组合”。创始人朱森华是宾夕法尼亚大学认知神经科学博士、中科院博士后,长期从事AI与脑认知交叉研究。进入华为后,他曾任华为云AI算法创新Lab主任,主导过AI脑科学云平台、盘古具身大模型、全球具身智能产业创新中心等项目,也曾担任华为“天才少年”面试官。在业内,他也因此被称为“华为具身大脑一号位”。
联合创始人刘晋宇则补上了产品化和全球商业化能力。他长期深耕AI机器人产品落地与全球化拓展,曾参与多个产品线从0到1孵化和规模化落地,在工业与商用场景中积累了丰富的产品定义、市场拓展和客户交付经验。
再往下看,具脑磐石核心团队覆盖清华、北大、复旦、中科院等顶尖院所,也有华为、联想、旷视、极智嘉等一线企业背景,形成了从前沿技术研究、软硬件研发、工程化到商业化落地的全链路配置。这对一家做“具身大脑”的公司来说很关键。因为认知世界模型最终要落到机器人系统里,既要处理模型架构和主动推理,也要面对本体差异、传感器接入、动作执行、现场部署和客户交付。具脑磐石的团队结构,恰好覆盖了从理论到工程、从算法到商业化的关键环节。
在商业化上,具脑磐石选择了一条相对务实的路线。公司不会等待通用机器人大脑完全成熟,再去谈落地。而是优先沉淀具身技能学习、认知地图移动导航、一脑多机协同等可复用模块,在真实场景中形成数据与现金流闭环,再反哺核心研发。场景选择上,具脑磐石也有明确标准:客户真实付费、方案具备跨场景复制性、技术挑战能够倒逼核心模型迭代。目前,该公司已在国内外同步推进多个行业客户PoC,并签约多家海内外行业战略合作伙伴。
产品路径上,具脑磐石提出了“一脑多机、一脑多形”。短期看,是用类脑智能驱动的Agent框架支持多机协作;中期看,是探索单一认知世界模型适配不同机器人本体;长期看,则是向行业开放通用具身大脑模型。对具脑磐石来说,此轮融资之后最重要的答卷,就是让认知世界模型在真实机器人任务中跑起来。
客观来看,具脑磐石“从类脑智能出发重塑机器人认知”的路线,为当前略显同质化的具身智能赛道提供了一种差异化视角。它没有陷入“堆数据、堆算力”的内卷,而是试图从人类大脑的运行机制中寻找更高效、更通用的解决方案。这种路径能否最终跑通,取决于认知世界模型在真实场景中的泛化能力与工程效率。但如果成功,它将不仅仅是击败VLA,而是从根本上改变了造机器人“大脑”的范式——从训练统计模型的肌肉记忆,转向赋予机器人真正的思考和推理能力。这条路的尽头,或许是一个真正能够自主学习、适应和进化的物理世界智能体。对于整个AI行业来说,这无疑是更具想象力也更值得期待的远景。