Rain科技11月29日报道,在计算机视觉领域的顶级学术会议ICCV 2025上,RealADSim挑战赛公布了比赛结果。小米汽车团队在“外推新视角合成”赛道的激烈角逐中脱颖而出,成功击败了来自全球的18支顶尖团队,荣获冠军。
ICCV作为两年一度的全球计算机视觉盛会,汇聚了该领域的最新研究成果。而RealADSim挑战赛则专注于自动驾驶仿真等前沿技术的研究与应用,旨在推动自动驾驶系统的安全性和可靠性发展。

本次比赛提出的挑战,直接触及了自动驾驶算法验证中的关键瓶颈。传统的仿真工具往往存在与真实路况差距过大,或者难以实现有效的闭环交互等问题。而新兴的新视角合成(NVS)技术虽然能够构建出动态的4D交互环境,但在进行视角外推时,如何保证生成场景的真实感和几何一致性,依然是一个亟待解决的难题。
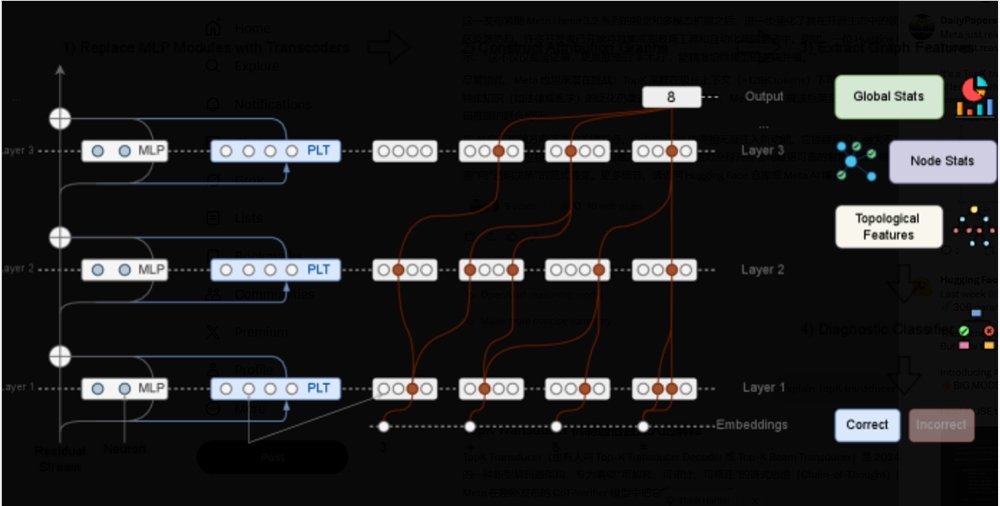
小米汽车团队此次能够脱颖而出,关键在于其创新的技术解决方案。他们基于3D高斯泼溅(3DGS)这一先进技术,设计并实现了一个精巧的四阶段处理流程。首先,团队巧妙地利用视觉信息生成“伪点云”,以此作为无激光雷达点云的初始化,有效规避了在建模过程中可能出现的局部最优问题。

在几何一致性方面,小米团队的方案进一步引入了2D-SDF路面模型,将几何先验信息嵌入其中,从而保障了在不同外推视角下的几何信息保持高度一致。同时,他们还创新性地引入了“伪真值”的概念,用于监督和修复外推过程中产生的各种瑕疵。此外,通过借助于时序不变适应网络(Temporal Invariance Adaptive Network),团队成功消除了光照变化等时间相关的干扰因素,进一步提升了生成场景的鲁棒性。
从实验数据来看,小米汽车团队的方案取得了令人瞩目的成绩。其在PSNR(峰值信噪比)、SSIM(结构相似性指数)和LPIPS(学习感知图像补丁相似度)等关键评估指标上分别达到了18.228、0.514和0.288,均位居榜首。特别值得一提的是,该方案在完全不依赖激光雷达数据的情况下,依然能够实现对场景的高精度建模,这为未来自动驾驶系统的高保真仿真测试提供了极具价值的新范式和技术路径,预示着在成本和数据依赖性方面可能实现突破。